Control of Power-Assist Exoskeleton Robots With Biological Signals
By Kazuo Kiguchi View In Digital Edition
A viable power-assist exoskeleton robot — sometimes called a power suit, man amplifier, or man magnifier — is something that many people in industry, military, and medicine look at incorporating into their work forces. Continual progress in robotics technology has increased the number of power-assist exoskeleton robots that have come onto the scene.
It's important that a power-assist exoskeleton robot automatically assists the user’s motion according to that motion intention in real time. Electromyographic (EMG) signals — which are generated when muscles are activated — are one of the most important biological signals to determine the user’s motion. The amount of the EMG signal indicates the muscle activity level (i.e., the amount of generating force) and it can be easily measured using simple electrodes.
If the amount of generating force by certain muscles is estimated, the amount of user’s joint torque can also be estimated (see Figure 1).
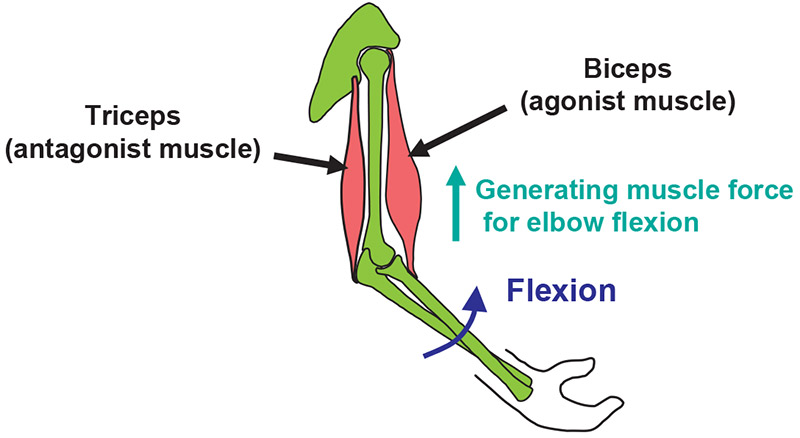
FIGURE 1. Joint torque and muscle force.
Therefore, it can be used to activate the power-assist exoskeleton robot automatically, since it directly reflects the intention of the user. Consequently, human motion can be estimated if the amount of muscle force of certain muscles is estimated. If the user’s motion is estimated in real time, the motion can be easily assisted by the exoskeleton. The EMG-based control is not very easy to be realized, however, because of several reasons.
In this article, EMG-based control methods for power-assist exoskeleton robots will be discussed. Soft computing technologies such as fuzzy reasoning, neural networks, or genetic algorithms are powerful tools to make the robot system intelligent. They can be applied to develop an effective EMG-based controller for power-assist exoskeleton robots. We'll discuss two kinds of EMG-based control methods in which soft computing technologies are described and applied.
The Geometry of Power-Assist
Because the power-assist exoskeleton robot is going to be directly attached to the user’s body, the design condition of the robot architecture is restricted in comparison with that of ordinal robots. The actuators, sensors, links, and frames of the exoskeleton must all be located outside of the user’s body and not disturb the user’s motion under any configuration. Moreover, the weight of the exoskeleton should not be directly supported by the user’s body.
Therefore, the hardware design is harder to come up with than that of ordinary robots. Development of small-size, light-weight, and high-power actuators such as artificial muscles are required to be practically wearable for daily living.
Upper-limb motion is involved in many important activities in daily living, so assistance here is important for physically weak persons. Figure 2 shows an example of 4 DOF (degrees of freedom) upper-limb motion (i.e., shoulder vertical flexion/extension, shoulder horizontal flexion/extension, elbow flexion/extension, and forearm pronation/supination) [1].
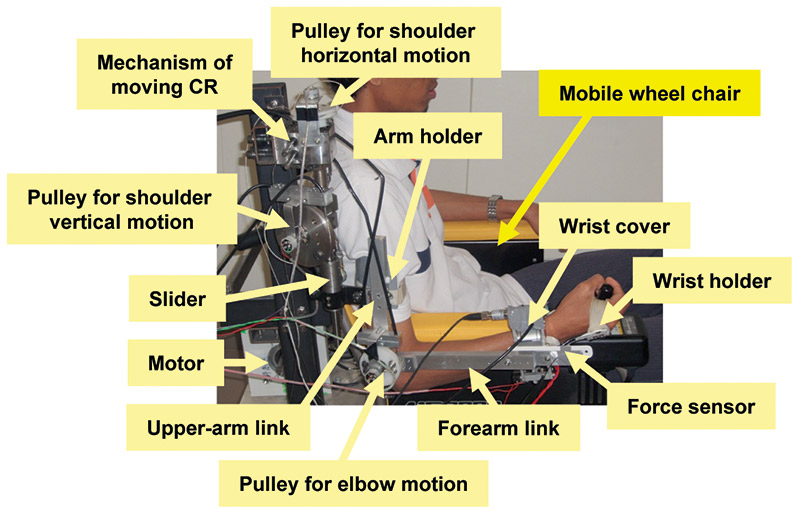
FIGURE 2. 4DOF power-assist exoskeleton.
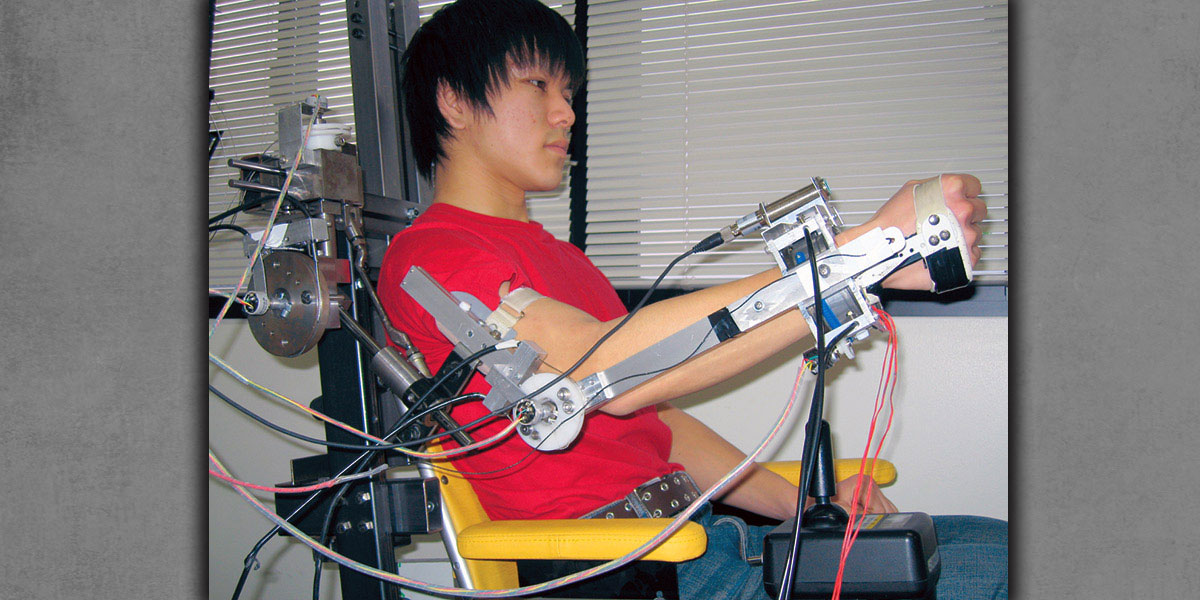
In this case, the exoskeleton robot is attached to the mobile wheelchair. Therefore, the user does not carry any of the weight at all. The exoskeleton mainly consists of a shoulder motion support part, an elbow motion support part, and a forearm motion support part.
The shoulder motion support part is composed of an upper arm link, driver and driven pulleys (one for shoulder horizontal flexion/extension motion, another one for shoulder vertical flexion/extension motion), two DC motors, two potentiometers, an arm holder, and the mechanism for the center of rotation (CR) of the shoulder joint. The 1 DOF elbow motion part consists of a forearm link, pulleys, a DC motor, and a potentiometer. The forearm motion support consists of a wrist frame, an inner and outer wrist holder, a wrist cover, a wrist force sensor, and potentiometers.
Usually, the movable range of the human shoulder is 180° in flexion, 60° in extension, 180° in abduction, 75° in adduction, 100-110° in internal rotation, and 80-90° in external rotation. The limitation of the movable range of the forearm motion is 50-80° in pronation and 80-90° in supination, and elbow motion is 145° in flexion and -5° in extension.
Considering the minimal amount of motion required in everyday life and the safety of the user, shoulder motion of the 4 DOF exoskeleton is limited to 0° in extension and adduction, 90° in flexion, and 90° in abduction. Limitation of the forearm motion is 50° in pronation and 80° in supination, and 120° in flexion and 0° in extension for the elbow motion.
In order to activate the exoskeleton in accordance with the user’s intended motion, the EMG-based control can be applied as explained next. In order to control the 4 DOF upper-limb motion, 12 kinds of EMG signals should be used, as shown in Figure 3.
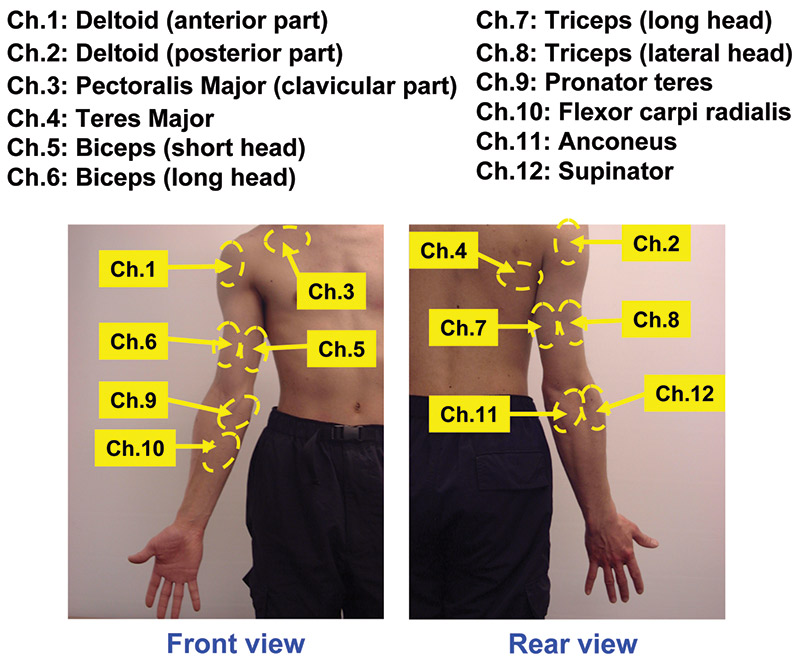
FIGURE 3. Location of electrodes.
Control with Biological Signals
In order to assist the motion of the user, the exoskeleton robot must determine the generating motion in realtime. The user’s motion can be estimated in real time by monitoring the EMG signals of the certain muscles. Since the amount of EMG signal indicates the activity level of the muscles, the amount of generating force by the user can be estimated by monitoring these signals.
However, this EMG-based controller is not very easy to be realized, because:
- Obtaining the same EMG signal for the same motion is difficult even with the same person since the signal is biologically generated.
- The activity level of each muscle and the way they’re used for certain motion is different among individuals.
- Activity of antagonist muscles affects the joint torque (see Figure 1).
- Many muscles are involved in a joint motion.
- A muscle is used for more than one kind of motion.
- The role of each muscle for a certain motion varies with joint angles.
- The activity level of some muscles (such as bi-articular) are affected by the movement of the other joints.
There are basically two kinds of methods to carry out power-assistance based on the user’s EMG signals. One way is a fuzzy-neuro control method (the combination of flexible fuzzy control and an adaptive neural network) [1]-[4] and the other is a muscle-model based control method.
In the first method, the user’s motion is estimated based on the EMG activation patterns of the related muscles, and then the power-assist is performed to accomplish the estimated motion. The fuzzy IF-THEN rules are designed based on the relationship between the human motion and the EMG activation patterns of the related muscles. The designed fuzzy IF-THEN rules are transferred into the form of neural networks so they can adapt to an arbitrary user. As the number of assisting DOF is increased, the required fuzzy IF-THEN rules become more complicated to cope with this.
In the second EMG-based method, the user’s motion is estimated on the amount of EMG activity levels of the related muscles. A muscle-model (i.e., a matrix) that relates human joint torque and the amount of EMG activity levels is based on the knowledge of human anatomy. However, each component of the matrix must be modified according to the posture of the user, since the relationship between the human joint torque and the amount of EMG activity levels varies.
A fuzzy-neural network can be applied to modify the muscle-model in real time according to the posture of the arbitrary user. The control system for the power-assist exoskeleton robot for 5 DOF upper-limb motion (i.e., shoulder flexion/extension, shoulder adduction/abduction, shoulder internal/external rotation, elbow flexion/extension, and forearm pronation/supination) is shown in Figure 4.
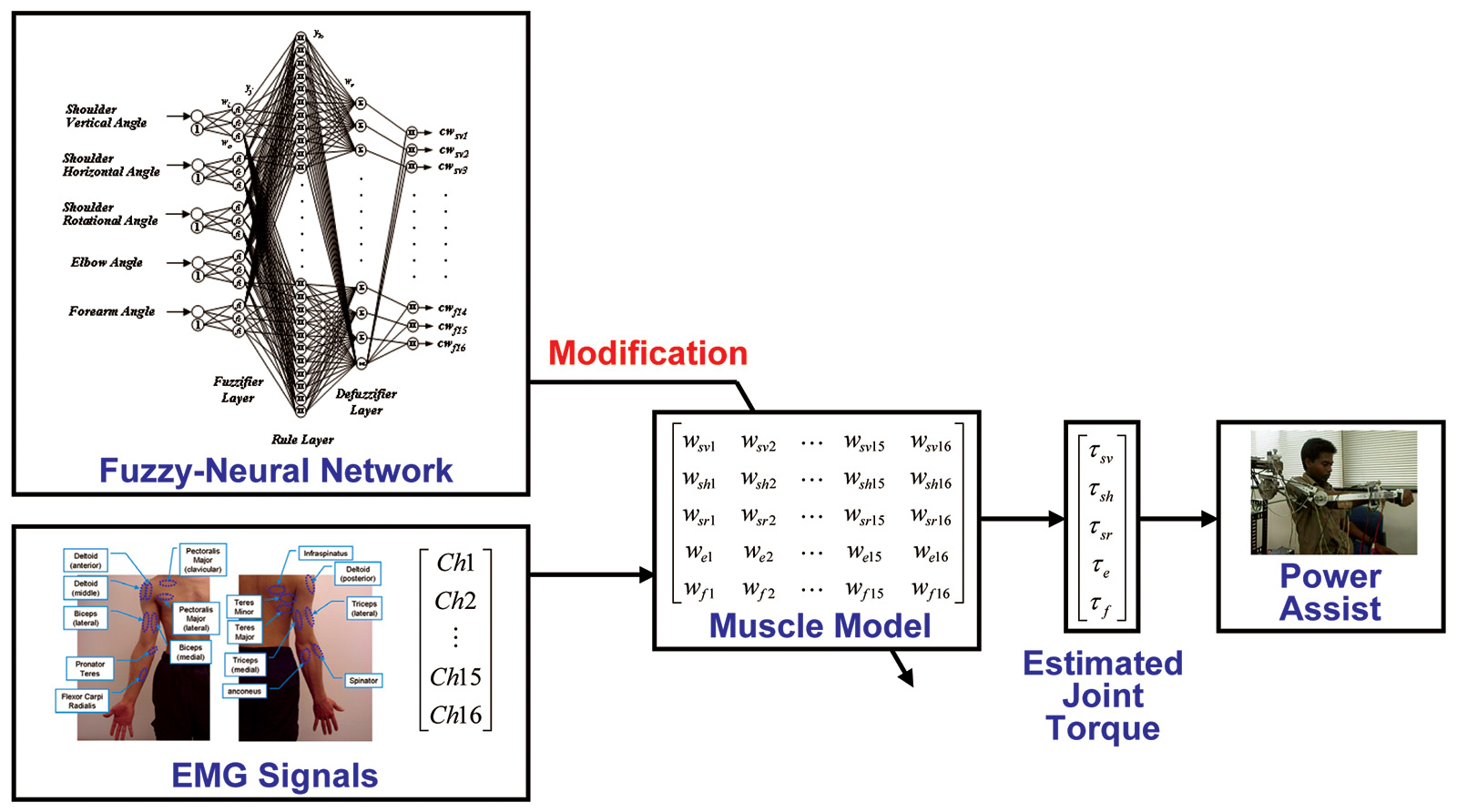
FIGURE 4. Architecture of proposed EMG-based controller.
The relationship between the EMG signals and the generated joint torques are written as the following equation if the posture of the user’s upper-limb does not change.
Equasion 1:
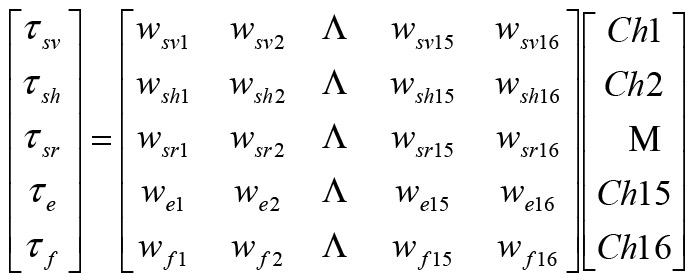
where tsv is torque for shoulder flexion/extension motion, tsh is torque for shoulder adduction/abduction motion, tsr is torque for shoulder rotational motion, te denotes torque for elbow motion, and tf is torque for forearm motion. Chn is the EMG signal measured in channel n, wsvn is the weight for nth EMG to estimate the torque for shoulder flexion/extension motion, wshn is the weight for nth EMG to estimate the torque for shoulder adduction/abduction motion, wsrn is the weight for nth EMG to estimate the torque for shoulder rotational motion, wen is the weight for nth EMG to estimate the torque for elbow motion, and wfn is the weight for nth EMG to estimate the torque for forearm motion.
Five joint angles (shoulder flexion/extension angle, shoulder adduction/abduction angle, shoulder internal/external rotational angle, elbow flexion/extension angle, and forearm pronation/supination angle) are used as inputs for the fuzzy-neural network. Each joint angle is divided into three regions (i.e., FL: flexed region; IM: intermediate region; and EX: extended region for shoulder flexion/extension, adduction/abduction angles, and elbow flexion/extension angle; and IN: internal region; CE: center region; and EX: external region for shoulder internal/external rotational angle and forearm pronation/supination angle).
The output from the fuzzy-neural network is the coefficient for each weight in Equation 1. Consequently, the muscle-model (the weight matrix) in Equation 1 is adjusted by the fuzzy-neural network at every sampling time during the control as shown in Figure 4.
The fuzzy-neural network is trained to minimize the difference between the estimated torque and the measured generated torque during the training period using the error back-propagation learning algorithm (i.e., one of the most typical learning algorithms for neural networks).
Evaluation
In order to evaluate the effectiveness of the motion estimation methods for the power-assistance explained here, experiments have been carried out to determine the relationship between the human 5 DOF upper-limb motion (3 DOF shoulder joint motion, elbow joint motion, and forearm pronation/supination motion) and the EMG signals of the related muscles (deltoid-anterior part, deltoid-middle part, deltoid-posterior part, pectoralis major-clavicular part, pectoralis major-lateral part, biceps-medial part, biceps-lateral part, triceps-medial part, triceps-lateral part, teres major, teres minor, infraspinatus, pronator teres, flexor carpi radialis, anconeus, and supinator). The effectiveness of the fuzzy-neuro method has been proven in many papers [1]-[4].
In one experiment, random upper-limb motion is performed by five healthy, elderly male persons (all of them are 65 years or older), and the estimation error of the generated upper-limb motion is evaluated. The motion of each subject is measured by a 3D motion capture system (Hawk Digital System and a high-speed camera from NAC Image Technology, Inc.). In order to capture the 3D motion, 17 markers are put on each subject in the experiment as shown in Figure 5. The motion of the subject is monitored with eight cameras. Each joint torque generated by each subject during the experiment is estimated from the motion results calculated using human models [5].
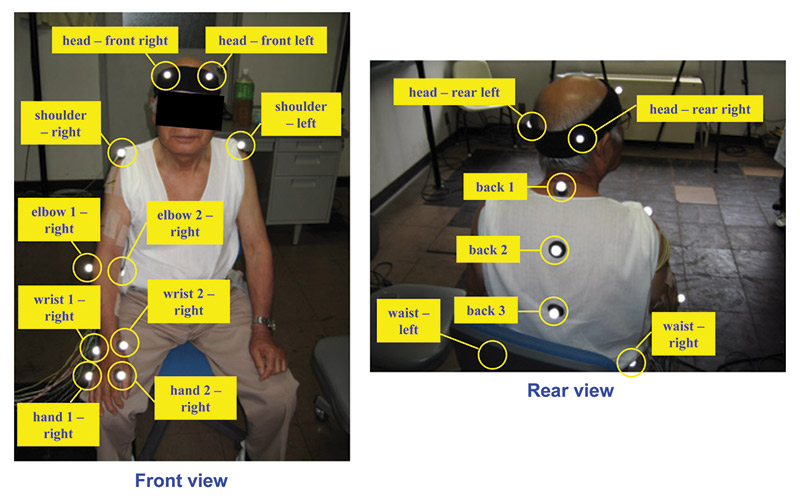
FIGURE 5. Location of markers in the experiment.
The experimental results of the torque generated by subject A are shown in Figure 6 as an example.
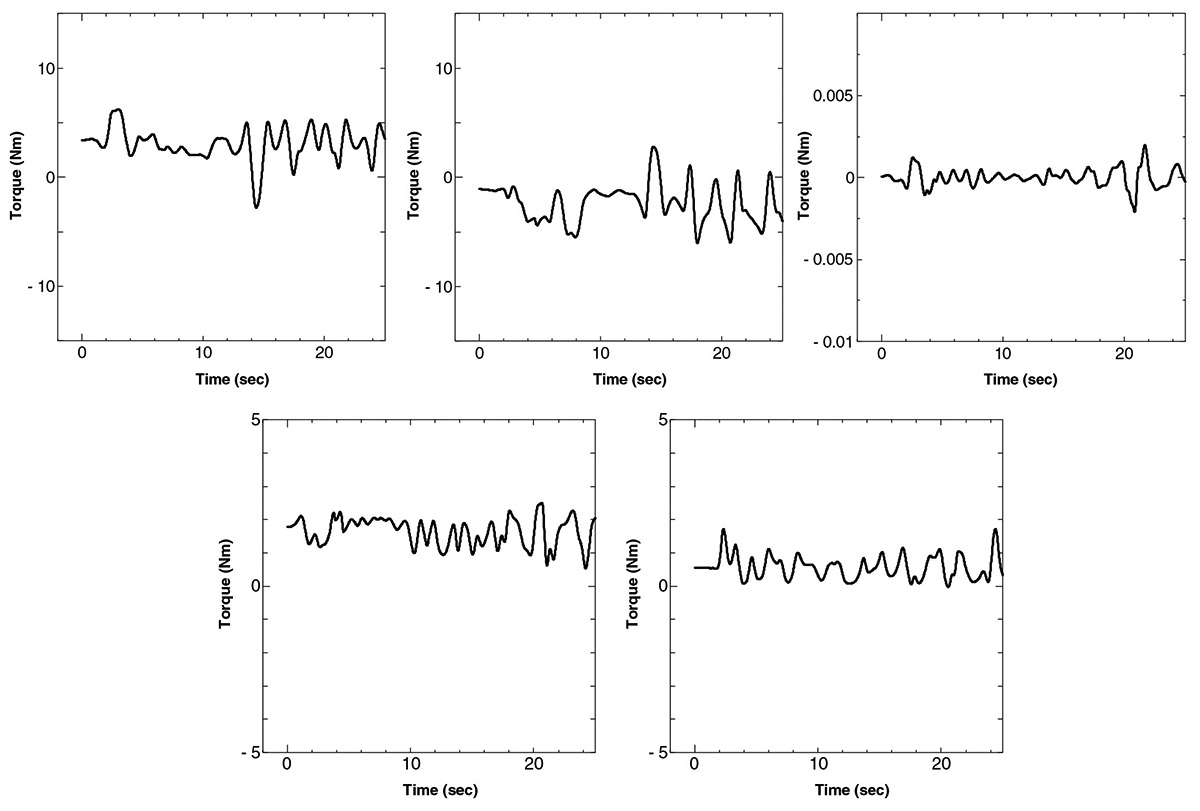
FIGURE 6. Generated joint torque (Subject A).
Figure 7 shows the error between the generated torque by subject A and the estimated torque with and without the second EMG-based control method. It can be seen that the amount of the torque error becomes almost zero when the weight matrix is adjusted by the second EMG-based control method. Similar results were obtained with the other subjects.
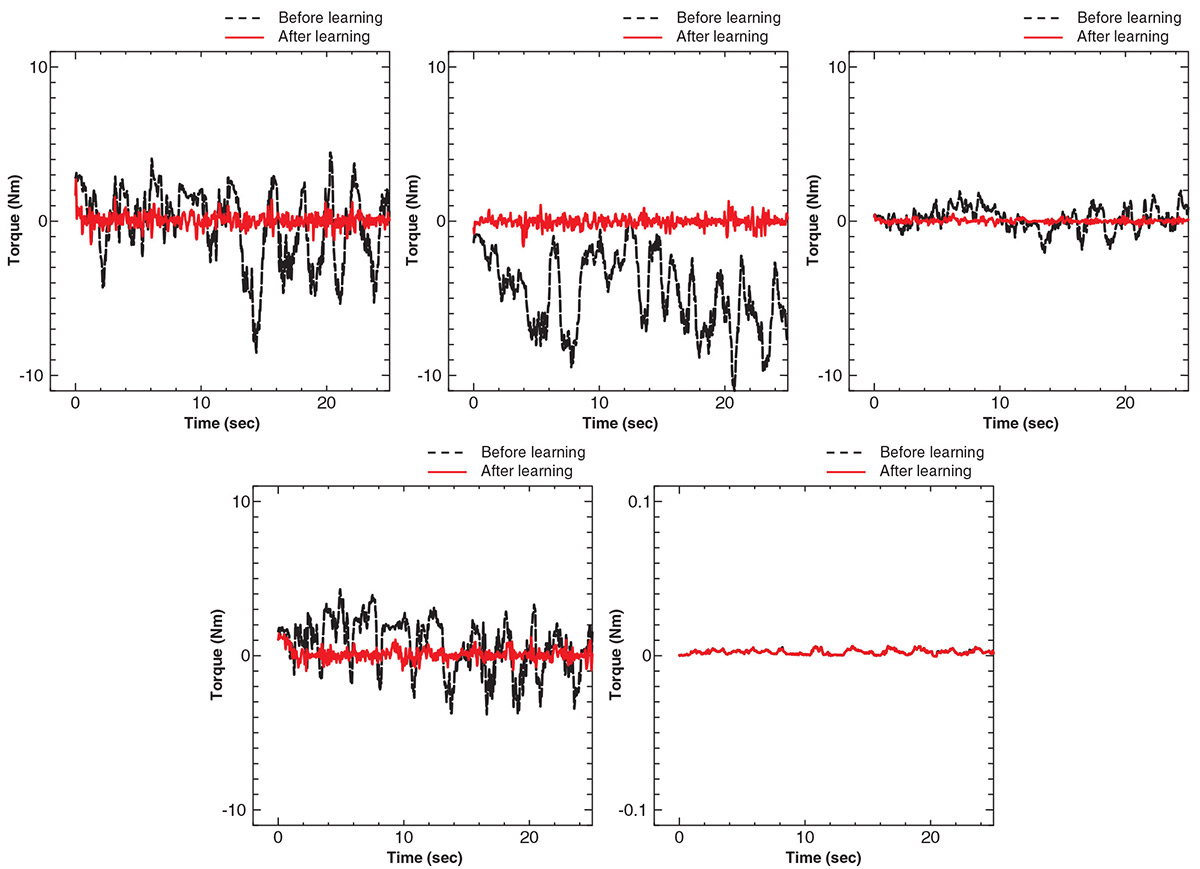
FIGURE 7. Estimated joint torque error (subject A).
These results show that the user’s joint torque can be estimated and a certain percentage of the estimated torque would be assisted by the exoskeleton robot in real time. Thus, the power-assist is realized with the proposed EMG-based control method.
Ideas for Future Expansion
Recent progress of robotics technology has brought several exoskeleton robots onto the market. However, they are still not ready for daily consumer use. More advanced soft computing technologies need to be developed to make the power-assist robots more intelligent and flexible. SV
Anatomy Lesson
Abduction — Moving a limb away from the midline. Think B for bird (aBduction) — raising your arms like a bird preparing for flight.
Adduction — Moving a limb toward midline. Think D for down (aDduction) — pushing your arms down in a resting position.
Pronation — Rotating the forearm and hand so that the palm is down. Think P for pouring water out of an imaginary bowl in the palm of your hand.
Supination — Rotating the forearm and hand so that the palm is up. Think S for holding a bowl of soup in the palm of your hand.
References
[1] K. Kiguchi, “Active Exoskeletons for Upper-Limb Motion Assist,” Journal of Humanoid Robotics, vol. 4, no. 3, 2007.
[2] K. Kiguchi, S. Kariya, K. Watanabe, K. Izumi, T. Fukuda, “An Exoskeletal Robot for Human Elbow Motion Support – Sensor Fusion, Adaptation, and Control,” IEEE Trans. on Systems, Man, and Cybernetics, Part B, vol.31, no.3, pp.353-361, 2001.
[3] K. Kiguchi, T. Tanaka, T. Fukuda, “Neuro-Fuzzy Control of a Robotic Exoskeleton with EMG Signals,” IEEE Trans. on Fuzzy Systems, vol.12, no.4, pp.481-490, 2004.
[4] K. Kiguchi, R. Esaki, T. Fukuda, “Development of a Wearable Exoskeleton for Daily Forearm Motion Assist,” Advanced Robotics, vol.19, no.7, pp.751-771, 2005.
[5] H. Okada, M. Ae, N. Fujii, Y. Morioka, “Body Segment Inertia Properties of Japanese Elderly,” Biomechanism 13, pp.125-139, 1996 (in Japanese).
Article Comments