Bots in Brief
Getting Jumpy

The design for the robot was determined through ‘a combination of mathematics, computer simulations, and laboratory experiments,’ the scientists said. (Image courtesy of the University of Manchester.)
Scientists have designed a robot that they claim could one day be able to jump 400 feet (120 meters) — high enough to clear the Statue of Liberty in a single bound. It could even leap as high as 650 feet (200 meters) on the moon.
The high-jumping robot is designed for exploring difficult terrain that conventional robots would struggle to traverse such as cave systems, forests, and potentially other planets. It features unique prism-shaped legs with stretchable springs designed to maximize the transfer of elastic energy into kinetic energy during a jump.
The researchers say their design could enable robots to jump to heights many times their own size, and more than six times higher than the current record. To demonstrate their design theory, the scientists built a 15.7 inch (40 cm) tall robot that could jump more than five feet (1.6 meters) in the air.
Lawnny 5 Will Mow You Over

Lawnny 5 is a tracked vehicle currently under remote control but with a planned autonomous capability. The frame includes a set of caster wheels at the front to take advantage of the differential steering of the tracks, and between everything is where the mower, plow (think snow), or other tool can sit.
The attachment system is based on a 2” receiver hitch, allowing the robot to eventually change tools at will while still preserving the usefulness of the tools in their original state. The robotic platform has been tested with the mower on a wet lawn with a 20° slope and showed no signs of struggle (and didn’t damage the grass), so it’s ready to take on more challenging tasks now as well.
With the core of the build out of the way, creator Jim Heising is well on his way to finishing this unique robotic lawnmower with autonomous potential, not to mention it having interchangeable tools that he hopes will be put to work in other ways (like parking his boat in a small space by his house).
For those maintaining a piece of land a little more involved than suburban turfgrass, there are other robotic platforms capable of helping out farmers with things like planting, watering, and weeding.
You can follow Jim’s progress on Hackaday at https://hackaday.io/project/194674-lawnny-five.
Don’t Get Attached
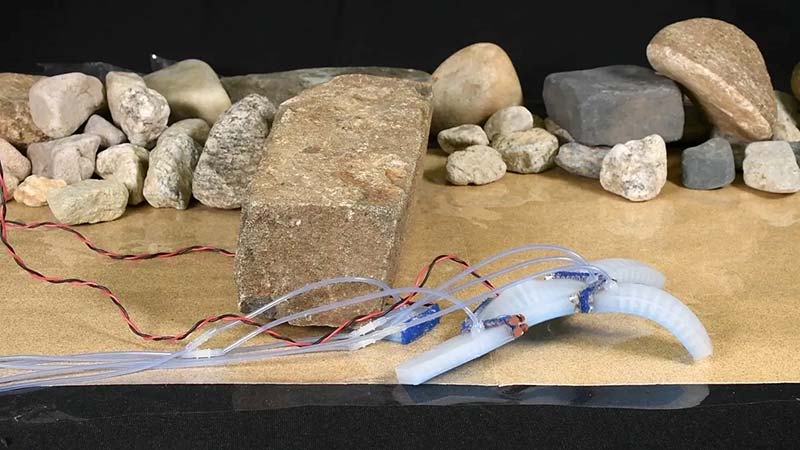
A squished leg can’t stop this previously four-legged soft robot. (Photo courtesy of the Faboratory at Yale.)
In a recent paper*, roboticists from The Faboratory at Yale University have given a soft robot the ability to detach and reattach pieces of itself, adjusting its body morphology when necessary.
These are fairly standard soft-bodied silicon robots that use asymmetrically stiff air chambers that inflate and deflate (using a tethered pump and valves) to generate a walking or crawling motion. What’s new here are the joints which rely on a new material called a bicontinuous thermoplastic foam (BTF) to form a supportive structure for a sticky polymer that’s solid at room temperature but can be melted easily.
The BTF acts like a sponge to prevent the polymer from running all over the place when it melts, which means you can pull two BTF surfaces apart by melting the joint and stick them together again by reversing the procedure. The process takes about 10 minutes and the resulting joint is quite strong.
It’s also good for a couple of hundred detach/re-attach cycles before degrading. It even stands up to dirt and water reasonably well.
*“Self-Amputating and Interfusing Machines,” by Bilige Yang, Amir Mohammadi Nasab, Stephanie J. Woodman, Eugene Thomas, Liana G. Tilton, Michael Levin, and Rebecca Kramer-Bottiglio.
Watch Where You’re Walking!

One of the great things about robots is that they aren’t constrained by how their biological counterparts do things. So, now there’s a quadruped with cameras on the bottom of its feet.
Sensorized feet is not really a new idea; it’s pretty common for quadrupedal robots to have some kind of foot-mounted force sensor to detect ground contact. Putting an actual camera down there is fairly novel, however, because it’s not at all obvious how you’d do it.
That’s the way roboticists from the Southern University of Science and Technology in Shenzhen went about doing it, and it’s not at all obvious.
“Go1’s” snazzy feet have soles made of transparent acrylic, with a slightly flexible plastic structure supporting a 60 millimeter gap up to each camera (640x480 at 120 frames per second) with a quartet of LEDs to provide illumination. While it’s complicated looking, at 120 grams, it doesn’t weigh all that much, and costs only about $50 per foot ($42 of which is the camera). The whole thing is sealed to keep out dirt and water.
The researchers acknowledge that their hardware could use a bit of robustifying, and they also want to try adding some tread patterns around the circumference of the foot since plexiglass is pretty slippery. The overall idea is to make Foot Vision (an innovative vision-based sensorized foot for quadruped robots) as useful as the much more common gripper-integrated vision systems for robotic manipulation, helping legged robots make better decisions about how to get to where they’re going.
Solar-Powered Drone is MAVelous
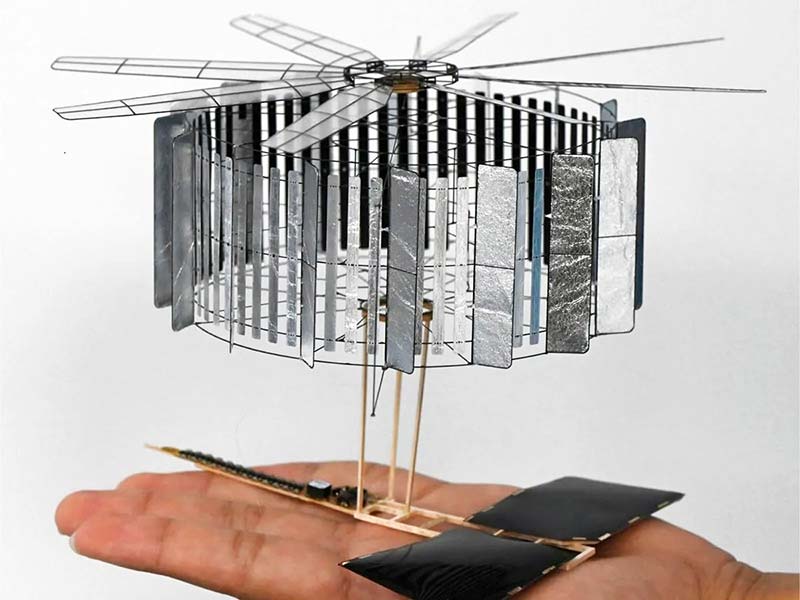
The palm-sized vehicle CoulombFly weighs 4.21 grams and has a wingspan of 20 centimeters.
Scientists in China have built what they claim to be the smallest and lightest solar-powered aerial vehicle. It’s small enough to sit in the palm of a person’s hand, weighs less than a US nickel, and can fly indefinitely while the sun shines on it.
Micro aerial vehicles (MAVs) are insect- and bird-size aircraft that might prove useful for reconnaissance and other possible applications. However, a major problem that MAVs currently face is their limited flight times; usually about 30 minutes. Ultralight MAVs (those weighing less than 10 grams) can often only stay aloft for less than 10 minutes.
One potential way to keep MAVs flying longer is to power them with a consistent source of energy such as sunlight. Now, in a recent study, researchers have developed what they say is the first solar-powered MAV capable of sustained flight.
The new ultralight MAV called CoulombFly is just 4.21g with a wingspan of 20 centimeters. That’s about 10 times as small as and roughly 600 times as light as the previous smallest sunlight-powered aircraft: a quadcopter that’s two meters wide and weighs 2.6 kilograms.
In tests under natural sunlight conditions (about 920 watts of light per square meter), CoulombFly successfully took off within one second and sustained flight for an hour without any deterioration in performance.
Sunlight electrically charges CoulombFly’s outer ring, and its 16 plates generate electric fields. The brushes on the outer ring’s plates touch the inner ring, electrically charging the rotor slats. The electric fields of the outer ring’s plates exert force on the charged rotor slats, making the inner ring and the propeller spin.
Hug It Out

Perching with winged Unmanned Aerial Vehicles (UAVs) has often been solved by means of complex control or intricate appendages. Now, Nature Communications Engineering presents a method that relies on passive wing morphing for crash-landing on trees and other types of vertical poles.
Inspired by the adaptability of animal and bat limbs in gripping and holding onto trees, they designed dual-purpose wings that enable both aerial gliding and perching on poles. With an upturned nose design, the robot can passively reorient from horizontal flight to vertical upon a head-on crash with a pole, followed by hugging with its wings to perch.
The robot robustly reorients at impact angles above 15° and speeds of 3 m⋅s−1 to 9 m⋅s−1, and can hold onto various pole types larger than 28% of its wingspan in diameter. The crash-perching on tree trunks has had an overall success rate of 73%. This method opens up new possibilities for the use of aerial robots in applications such as inspection, maintenance, and biodiversity conservation.
Smokin’ Bot

VERO has been tested successfully in six different scenarios that challenge both its locomotion and detection capabilities.

IIT’s VERO vacuuming quadruped prepares to clean cigarette butts from a beach in Genoa.
Cigarette butts are the second most common form of litter on earth — of the six trillion-ish cigarettes inhaled every year, it’s estimated that over four trillion of the butts are just tossed onto the ground, each one leeching over 700 different toxic chemicals into the environment.
To help combat this mess, roboticists from the Dynamic Legged Systems unit at the Italian Institute of Technology (IIT) in Genoa have designed a novel platform for cigarette-butt cleanup in the form of a quadrupedal robot with vacuums attached to its feet.
There are probably far more efficient ways of at least partially automating the cleanup of litter with machines. The challenge is that most of that automation relies on mobility systems with wheels, which won’t work on the many beautiful beaches (and flights of stairs) of Genoa. In places like these, it still falls to humans to do the hard work, which is less than ideal.
The robot, developed in Claudio Semini’s lab at IIT, is called VERO (Vacuum-cleaner Equipped RObot). It’s based around an AlienGo from Unitree, with a commercial vacuum mounted on its back. Hoses go from the vacuum down the leg to each foot, with a custom 3D-printed nozzle that puts as much suction near the ground as possible without tripping the robot up.
While the vacuum is novel, the real contribution here is how the robot autonomously locates things on the ground and then plans how to interact with those things using its feet.
Initial testing with the robot in a variety of different environments showed that it could successfully collect just under 90 percent of cigarette butts.
Save Saggy Skin

Researchers have pioneered a method that involves injecting artificially grown skin into tiny holes in a robot’s skeleton, so the skin can extend v-shaped hooks known as “perforation-type anchors” and bind to the surface without drooping away. (Image credit: Shoji Takeuchi, Institute of Industrial Science (IIS), the University of Tokyo)
Thanks to a novel approach involving cultured skin cells and silicone, robots of the future could be wrapped in lifelike skin that can repair itself in a similar manner to the way human skin heals. The artificial skin is being developed as part of a study at the Institute of Industrial Science (IIS) at the University of Tokyo. This version will appear more lifelike thanks to a new way of attaching it to the robot’s skeleton, as well as the fact that it can repair any cuts or scrapes by itself.
Artificial skin has long been touted as a way to make robots appear more human-like and cultured skin appears more lifelike than synthetic materials such as latex. Without the right kind of adhesive approach, however, artificial skin can sag off a robot’s frame in a visually disturbing manner.
Robotics researchers have previously tried to solve the problem of artificial skin sagging off metallic frames by pinning it down with “anchors” or hooks or mushroom-shaped structures. This prevents the skin from shifting around atop the robot’s frame, but the adhesive structures can stick out as lumps under the skin, which compromises its human-like appearance.
In this new study, researchers pioneered a method whereby the robot’s skeleton contains tiny holes into which the artificially grown skin can extend V-shaped hooks known as “perforation-type anchors.” These keep the artificial skin stuck to the robot while maintaining a smooth and flexible surface.
The artificial skin is layered on top of a robot treated with a water-vapor plasma to make it hydrophilic. In other words, to ensure that liquids are attracted to the surface. This means the cultured skin’s gel is pulled deeper into the holes to cling more closely to the surface of the robot. One of the main benefits of this new skin is that it would allow robots to operate alongside humans without experiencing undue wear and tear. Small tears or similar defacements could be repaired without needing to manually repair the robots, the team said. They did not, however, measure how quickly the artificial skin healed after sustaining damage.
Shoji Takeuchi, one of the researchers on the study, recently told Live Science that several steps will still need to be taken before robots are likely to be wearing skin using the team’s methods. Takeuchi also noted that to be truly functional, artificial skin will eventually have to convey sensory info such as temperature and touch to any robot wearing it, as well as be resistant to biological contamination.
The scientists said their research could further our understanding of how facial muscles convey emotion which could, in turn, drive breakthroughs in surgery to treat conditions like facial paralysis or expand the capabilities of cosmetics and orthopedic surgery.
Article Comments